![]()
![]()
![]()
![]()
")
Rahmendaten
Zeitraum: 2024 - 2027
Team:Mit dem Projekt „PROMETHEUS“ (PROject for Mapping the EarTH´s Extraneous and Undetected Sites*) versucht der Arbeitsbereich Kartographie am Geographischen Institut der Ruhr-Universität Bochum innovative und nachhaltige Kartierungsmethoden zu entwickeln, die auf modernen Techniken basieren und entscheidend zur Aufdeckung bisher unbekannter Strukturen und Phänomene auf der Erdoberfläche beitragen können. Die neuen Kartierungsmethoden zielen darauf ab, an Orten eingesetzt zu werden, die schwer zugänglich sind oder an denen nur mit extremem Arbeitsaufwand raumzeitliche Daten verlässlich aufgenommen werden können. Insbesondere die hohe bauliche Dichte und explizite Kleinkammerung urbaner Umgebungen (heterogene Bauformen, komplexe Verkehrsinfrastrukturen, Nutzungsvielfalt der urbanen Flächen etc.) setzen Großtechnologien wie etwa Satellitenbildgenerierung physikalische Grenzen der Erfassung. Dies gilt u.a. für eine differenziertere und dynamische 3D-Ermittlung und Überwachung von Temperatur-, Lärm-, Luftfeuchte oder auch CO2- Werte in urbanen Umgebungen. Eine stärker differenziertere und dynamische 3D-Ermittlung und Überwachung von Temperatur-, Lärm-, Luftfeuchte oder auch CO2- Werte sind in urbanen Umgebungen damit kaum zu erreichen. Für die Entwicklung von Konzepten zur Bewältigung drängender gesellschaftlicher Probleme - wie der Schaffung klimaresilienter Städte, dem umweltschonenden Umgang mit Ressourcen, der Detektion von CO2 Quellen und -Senken etc., ist die valide Kartierung kleinräumiger Informationen jedoch dringend notwendig.
Für die kleinräumige Erfassung von Geodaten erscheinen grundsätzlich Techniken vielversprechend, die an die Untersuchungssituation vor Ort angepasst sind und eine hinreichend geometrische Genauigkeit bei der Datenerhebung gewährleisten können. Im Projekt „PROMETHEUS“ des Fachbereichs Kartographie sollen geeignete Kartierungssysteme entwickelt werden, die die systematische Datenaufnahme und -visualisierung entscheidend verbessern und so zur Schaffung neuer Erkenntnisse beitragen können. Indem technische Grundlagen zur Absenkung von Hürden in der Erfassung und Bereitstellung wissenschaftlicher Daten (etwa auch im Rahmen von Citizen Sciences) entwickelt werden sollen, schließt das Projekt an die Arbeiten des DFG Sonderschwerpunktprogramms „Volunteered Geographic Information: Interpretation, Visualisierung und Social Computing, SSP 1894,“ (https://www.vgiscience.org/; 2017-2023) an.
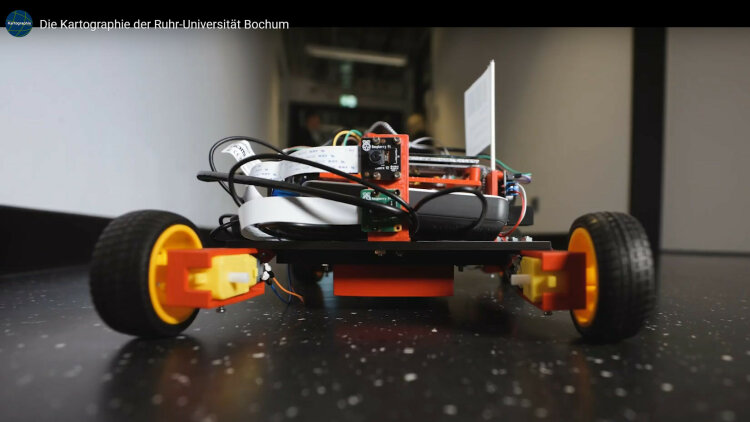
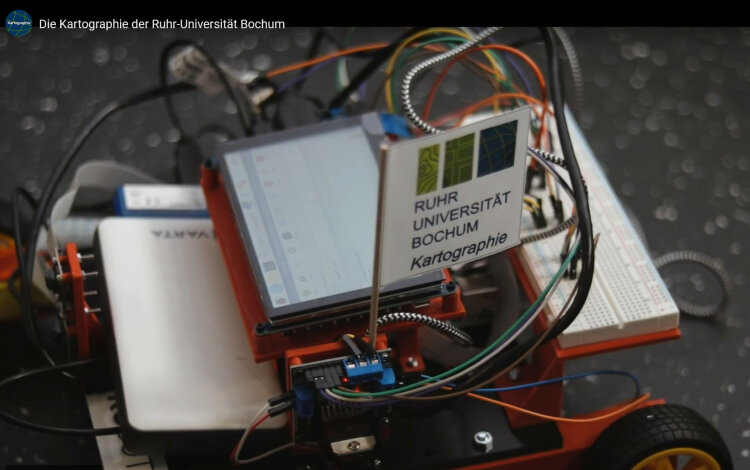
Mit RUBot 1.0 befindet sich der Prototyp einer erdgebundenen, semi-autonomen Sensorplattform im Aufbau, die zur Erfassung sowohl zwei- als auch dreidimensionaler Unterschiede in der Luftzusammensetzung in Gebäudeschluchten und auch innerhalb von Gebäuden (Innenräumen) eingesetzt werden soll (s. Abb.1). Mit der Sensorplattform lassen sich erstmals digitale Zwillinge räumlicher Phänomene im low-cost Segment (und damit für die Breitenanwendung) erzeugen, deren hohe lokale Auflösung unmittelbar mit bereits vorliegenden Geodaten verknüpft und so z.B. für vorbeugende Stadtentwicklungsmaßnahmen genutzt werden können.
")
")
RUBot 1.0 bildet den Start einer ganzen Reihe von semi-autonomen Sensorplattformen, deren Entwicklung für unterschiedliche Zwecke vorgesehen ist. Das Gesamtkonzept ist durch einen übergreifenden modularen Aufbau gekennzeichnet, der eine effiziente und kostengünstige Anpassung der Systeme an wechselnde räumliche Anforderungen ermöglicht. Bereits in der Planung befindet sich mit RUBot 2.0 eine drohnengestützte Sensorplattform zur Erfassung von Daten in oberflächennahen Luftschichten. Vorgesehen sind auch schwimm- und tauchfähige Systeme.
Für die Erfassung und Visualisierung von Geodaten wird versucht, fast vollständig auf open source basierte Methoden zurückzugreifen. Die entwickelten Workflows werden offengelegt (vgl. Keil et al. 2023, Weißmann et al. 2021, Dickmann 2021). Auch die eingesetzte Hardware beruht vielfach nicht auf kommerzieller Technik, sondern wird im Kartographie-Labor mit Hilfe eines 3D-Druckers erstellt. Dadurch ist Erzeugung individuell auf die kleinräumigen Problemstellungen zugeschnittener Sensorplattformen möglich. Für die Durchführung von Tests wird in zunehmendem Umfang auf die Versorgung mit Solarenergie gesetzt (vorgestellt während der Nachhaltigkeitswoche der RUB im Oktober 2023) LINK zum Poster]. Für die Durchführung C02-reduzierter Forschungsarbeiten in der Arbeitsgruppe Kartographie wurde 2021 eine mobile Solaranlage auf dem Dach des Institutsgebäudes (IA) aufgebaut, deren gewonnene Energie auch unmittelbar für die Tätigkeiten im PROMETHEUS-Projekt genutzt wird.
")
* Das Akronym „PROMETHEUS“ verweist mit Absicht auf den gleichnamigen Titanen der griechischen Mythologie, der den Menschen einst das Feuer gebracht haben soll. Das Feuer steht symbolisch für den Vorgang des Wissenserwerbs und somit für die Gewinnung neuer (auch räumlicher) Erkenntnisse. Heute wird Prometheus daher zumeist als Symbolfigur für den wissenschaftlich-technischen Fortschritt verstanden und ist Bestandteil des Universitätssiegels der Ruhr-Universität Bochum. Im Projekt steht der Titan für das Ziel, „Licht“ in bisher wenig bekanntes Terrain zu bringen und wichtige Geoinformationen zu ermitteln.
Keil, J., Weißmann, M., Korte, A., Edler, D., & Dickmann, F. (2023). Measuring physiological responses to visualizations of urban planning scenarios in immersive virtual reality. KN - Journal of Cartography and Geographic Information, 73(2), 117–126. https://doi.org/10.1007/s42489-023-00137-7
Weißmann, M., Edler, D., & Rienow, A. (2022). Potentials of low-budget microdrones: processing 3D point clouds and images for representing post-industrial landmarks in immersive virtual environments. Frontiers in Robotics and AI, 9, Article 886240. https://doi.org/10.3389/frobt.2022.886240
Dickmann PL (2021) Die Visualisierung von Augmented-Reality-Objekten in mobilen Anwendungen. KN - Journal of Cartography and Geographic Information, 71(2), A4–A9
Copyright © Geographisches Institut 2023
Letzte Änderung: 07. Dez. 2023
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}